|
|
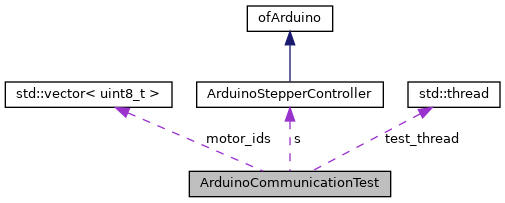
| ArduinoCommunicationTest (const std::string &device, const int baud, const std::vector< uint8_t > &motor_ids) |
| |
|
void | update () |
| |
|
void | sendTestRoutine () |
| |
|
|
void | onSetup () |
| |
|
void | onString (const std::string &str) |
| |
|
void | onEcho (const std::vector< uint8_t > &payload) |
| |
|
void | onEchoText (const std::vector< uint8_t > &payload) |
| |
|
void | onEchoInt32 (const std::vector< uint8_t > &payload) |
| |
|
void | onEchoRaw (const std::vector< uint8_t > &payload) |
| |
|
void | onSetSpeed (const uint8_t motor, const int16_t speed) |
| |
|
void | onGetSpeed (const uint8_t motor, const int16_t speed) |
| |
|
void | onSendStep (const uint8_t motor, const uint16_t steps, const int16_t speed) |
| |
|
void | onSeekPosition (const uint8_t motor, const int32_t position, const int16_t speed) |
| |
|
void | onGetPosition (const uint8_t motor, const int32_t position) |
| |
The documentation for this class was generated from the following files: