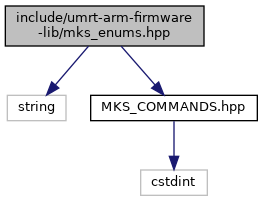
Enums for interacting with commands described in MKS_COMMANDS.hpp. More...
Include dependency graph for mks_enums.hpp:
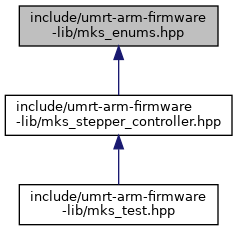
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Enumerations | |
| enum | MksMoveResponse : uint8_t { FAILED = 0 , MOVING = 1 , COMPLETED = 2 , LIMIT_REACHED = 3 } |
| Status code for the response to move commands. More... | |
Functions | |
| std::string | to_string_mks_move_response (const MksMoveResponse status) |
| Converts an MksMoveResponse to its string representation. More... | |
Detailed Description
Enums for interacting with commands described in MKS_COMMANDS.hpp.
These are separated because MKS_COMMANDS.hpp is parsed by MksTest.py to determine the command bytes it uses for its implementation.
Enumeration Type Documentation
◆ MksMoveResponse
| enum MksMoveResponse : uint8_t |
Status code for the response to move commands.
Used by SEND_STEP, SEEK_POS_BY_STEPS, SEND_ANGLE, and SEEK_POS_BY_ANGLE.
| Enumerator | |
|---|---|
| FAILED | Movement failed. |
| MOVING | The motor is moving. |
| COMPLETED | The motor has reached the target position. |
| LIMIT_REACHED | An end limit has been reached. |
Function Documentation
◆ to_string_mks_move_response()
|
inline |
Converts an MksMoveResponse to its string representation.
- Parameters
-
status response status to lookup